
To protect the device, the motor and the complete plant it is necessary to limit the variables torque, speed and position. These limits act independently of other limitations within the motion profile.
The limits are specified as percentages of the rated quantities (current, torque, speed,...), so that following calculation logical default settings are available. The default settings refer to 100% of the rated values and the parameters must thus be adapted to application and motor. The motor quantity limits can be read out in parameter P 0338 CON_SCON_ActMax.
Limitations in closed-loop controlled mode:
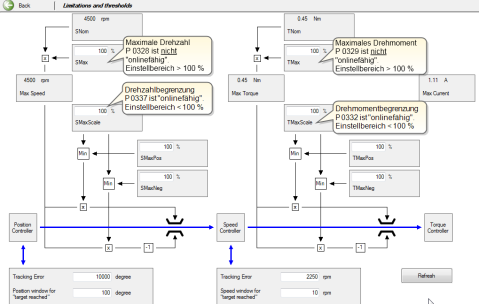
Bild: Schematic of torque/speed/position limitation
The torque is limited to a maximum by parameter P 0329 CON_SCON_TMax. In the default setting the torque limit corresponds to the rated torque of the motor. The possible setting range is
0 - 1000%. The parameter cannot be changed during operation. Any change only takes effect after restarting the control. Parameter P 0332 CON_SCON_TMaxScale enables the torque limit set in P 0329 to be scaled online – that is, during operation. It is additionally possible via P 0330 CON_SCON_TMaxNeg and P 0331 CON_SCON_TMaxPos to change the torque limit for different directions of rotation during operation.
| P. no. | Parameter name/Setting | Function |
|---|---|---|
| P 0225 | MPRO_REF_HOMING_TMaxScale | In the case of homing methods -8, -9, -10, -11 tracking error monitoring is disabled during execution. This avoids an error message being generated on contact with the block. The maximum permissible torque can be reduced specifically during homing. To do so, parameter P 0225 MPRO_REF_HOMING_TMaxScale is set in the range 0-100%. Note that this parameter replaces parameter P 0332 CON_SCON_TMaxScale during the homing run. |
| P 0329 | CON_SCON_TMax | Scaling of the maximum torque, referred to the rated torque P 0460 MOT_TNom The parameter cannot be changed online. |
| P 0330 | CON_SCON_TMaxNeg |
Torque limitation in negative direction The parameter can be changed online. |
| P 0331 | CON_SCON_TMaxPos | Torque limitation in positive direction. The parameter can be changed online. |
| P 0332 | CON_SCON_TMaxScale | Percentage weighting of torque, default 100% The parameter can be changed online. When running homing methods -8, -9, -10, -11 parameter P 0332 t has no effect. In this case the torque scaling should be executed via P 0225. |
| P 0460 | MOT_TNom | Motor rated torque |
| P 0741 | MON_TorqueThresh | Setting of limit for torque threshold (e.g. digital output). |
Tabelle: Parameters for torque limitation

|
NOTE: To protect against overspeed if a requested torque is not reached, P 0337 CON_SCON_SMaxScale is used to limit the speed controller to a percentage of the rated speed. |
The speed is limited to a maximum by parameter P 0328 CON_SCON_SMax. In the default setting the speed limit corresponds to the rated speed of the motor. The possible setting range is 0 - 1000%. The parameter cannot be changed during operation. Any change only takes effect after restarting the control. Parameter
P 0337 CON_SCON_SMaxScale enables the speed limit set in P 0328 to be scaled online – that is, during operation. It is additionally possible via P 0333 CON_SCON_SMaxNeg and P 0334 CON_SCON_SMaxPos to change the speed limit for different directions of rotation during operation. The "Speed reference reached window" is preset with P 0745(0) MON_RefWindow Target Reached. With P 0745(1) MON_RefWindow Standstill the standstill window for ROT_0 (speed 0), ROT_R (direction of rotation right) and ROT_L (direction of rotation left) is preset. The settings take effect online.
Parameters
| P. no. |
Parameter name/ Setting |
Function |
|---|---|---|
| P 0167 | MPRO_REF_OVR | Setting of override factor (speed limitation) |
| P 0328 | CON_SCON_Max | Absolute entry of maximum speed, referred to the rated speed P 0458 MOT_SNom. (not changeable online) |
| P 0333 | CON_SCON_S_MaxNeg | Speed limitation in negative direction (changeable online). |
| P 0334 | CON_SCON_S_MaxPos | Speed limitation in positive direction (changeable online). |
| P 0335 | CON_SCON_DirLock |
Reversing lock, left and right |
| P 0337 | CONSCON_S_MaxScale |
Explicit standstill window for friction torque compensation Speed scaling, default 100% (changeable online) |
| P 0338 | CON_SCON_ActMax | Limitations of motor quantities; current limit settings at a glance (current, speed, torque) |
| (0) | ActMax_Speed | Maximum speed Speed limitation |
| (1) | ActMax_Current | Maximum current Current limitation |
| (2) | ActMax_Torque | Maximum torque Torque limitation |
| (3) | ActMax_UsrSpeed | Maximum speed Speed limitation in user units |
| (4) - (6) | Reserve | Reserve |
| P 0740 | MON_SpeedThresh | Setting of threshold for maximum speed |
| P 0744 | MON_SDiffMax | Setting of threshold for maximum speed tracking error. |
| P 0745 | MON_RefWindow | Standstill window for speed |
| (0) | Target reached |
"Speed reference reached" window (changeable online) |
| (1) | Standstill |
With the "Standstill" setting the standstill window for ROT_0 (speed 0), ROT_R (direction of rotation right) and ROT_L (direction of rotation left) is preset. (changeable online) |
Tabelle: Parameters for speed limitation
With these two parameters the maximum permitted tracking error is defined. So as to specify a stable target position, the standstill window should be set correspondingly large.
Parameters
| P. no. |
Parameter name/ Setting |
Function |
|---|---|---|
| P 0743 | MON_UsrPosDiffMax | Limit value for the maximum permissible tracking error in user units. |
| P 0746 | MON_UsrPosWindow | Standstill window for position reached |
Tabelle: Parameters for position limitation
Copyright © LTi DRiVES GmbH, Januar 2013, ID-Nr.: 0842.26B.1-00 DE